How to interpret RAW Bayer data from the PiCam HQ
Jonathan Fabrizio - 01/06/20
The picams (V1, V2 and now HQ) are interesting cameras as they are not expensive and provide raw data from the sensor. Recently, a new one has been released, the PiCam HQ, but the official documentation does not provide any information on the internal format. This document, explains how to extract/interpret raw images with this new PiCam HQ. The complete pdf version is accessible here!
Introduction
The picams (V1, V2 and now HQ) are interesting cameras, usable in a research context and not expensive. It is possible to get raw data from these cameras but it lacks some documentation to interpret data for the last PiCam HQ. This lack will certainly be filled very soon, but until this update, we propose to share my work to help other people to make it work. I expose in this document the few things you need to interpret the data.
Note 1: My level in English is rather low, and especially, I have no time to write this report. I write it very fast, without proofreading it. There must be plenty of mistakes - please forgive me for that. It is better than nothing.
Note 2: You can download the content of this post as a pdf at the publications page
Before starting: you can read The official raspberry pi camera guide [7] which provide a lot of precious information. Details about picams can be found in [1]. This Picam HQ is based on the Sony IMX 477 CMOS sensor. You should have a look to its specification.
Configuration and acquisition; The official documentation [2,3] is well done except that the document states that the minimum GPU memory size is 128Mo. It was true for previous picams but not enough for the PiCam HQ. We were obliged to set it to 256Mo to make it work properly. Not really a problem (note: It is the gpu_mem option defined in /boot/config.txt).
To get the raw data, we use the python library picamera[6] (we did not try with V4L.). The procedure is explained in [4]. This procedure works properly to acquire data from the PiCam HQ however, this documentation is not up to date as it does not mention the Picam HQ. This is this temporary lack of documentation we will try to fill in this technical document.
Encoding
To understand how the data are stored, let's have a look at the encoding used by the previous picams. According to [4]:
- The raw data are located at the end of the file.
- The header of the raw data starts with the string BRCM.
- The first 32,768 bytes of this part is the header data, then comes the Bayer data.
- Bayer data is always full resolution.
- Bayer data occupies the last 6,404,096 bytes of the output file for the V1 module, or the last 10,270,208 bytes for the V2 module. Bayer data consists of 10-bit values
- The 10-bit values are organized as 4 8-bit values, followed by the low-order 2-bits of the 4 values packed into a fifth byte.
- Bayer data is organized in a BGGR pattern
- For the V1 module, the data consists of 1952 rows of 3264 bytes of data. The last 8 rows of data are unused (they only exist because the maximum resolution of 1944 rows is rounded up to the nearest 16).
- For the V2 module, the data consists of 2480 rows of 4128 bytes of data. There's actually 2464 rows of data, but the sensor's raw size is 2466 rows, rounded up to the nearest multiple of 16: 2480.
- The last few bytes of each row are unused.
To be able to interpret data from the PiCam HQ, we have to know all these parameters for the PiCam HQ, i.e., we have to find:
- The position and the size of the data in the file/the position and the size of the header,
- The size in byte of a line (the line stride) and how many pixels are store in this line/the number of lines,
- The correct variant of Bayer format,
- The encoding of the pixel values.
So many things to discover... To do so, ghex [5] is our friend. Let's go!
The position and the size of the header/the data in the file
We bet, the format is compatible with the previous modules.
| Module | Total length of the raw part (Bytes) | length of the header (Bytes) | length of the image (Bytes) |
|---|---|---|---|
| V1 | 6404096 | 32768 | 6371328 |
| V2 | 10270208 | 32768 | 10237440 |
| HQ | ? | ? | ? |
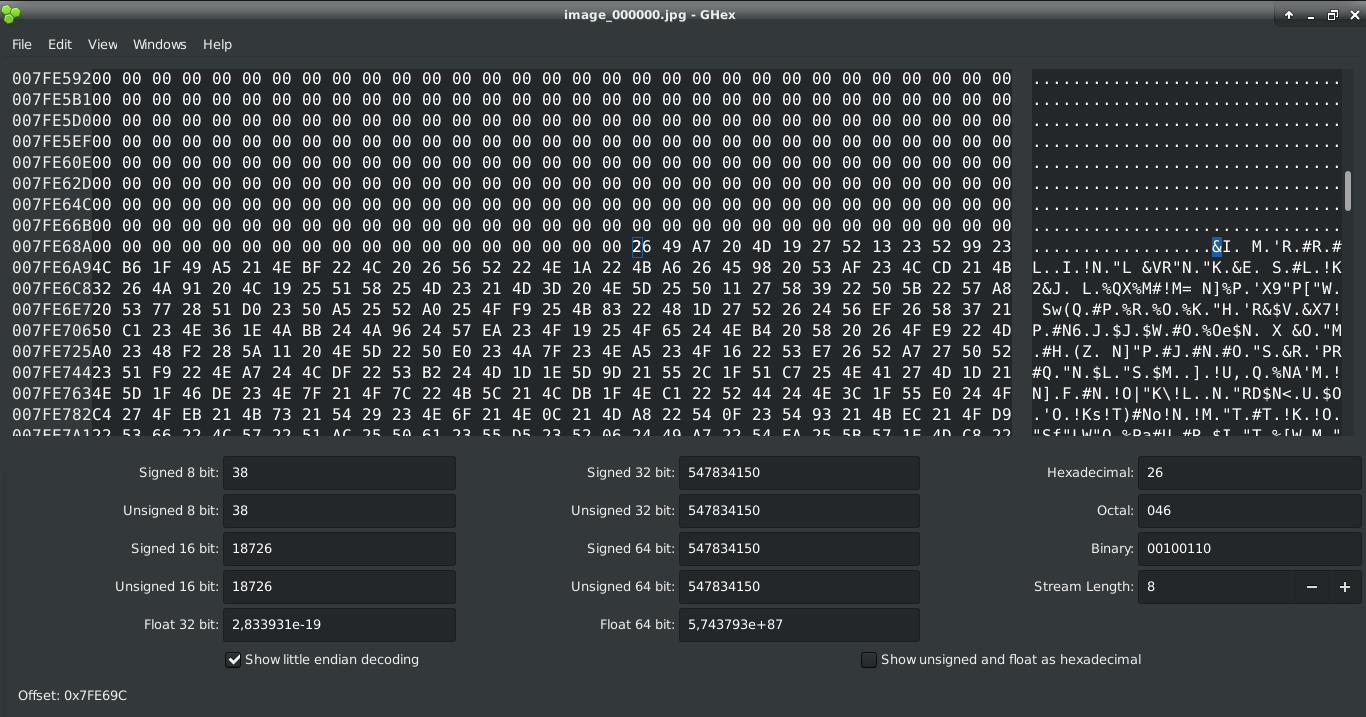
We have to take a picture with the PiCam HQ and we will see its content. The length of the file of the picture we took is 27060380 bytes. We open it with ghex and look for the string BRCM.

The offset of this string is at offset 8349340, this means that the complete raw part is 27060380 - 8349340 = 18711040 bytes long. We bet that the header has the same length compared to the previous modules: 32768 bytes. If we are right, this means that the image begins at offset 8382108 (0x7FE69C). This seems to be correct - data seem to start at this offset:
Then the data is 18711040 bytes long (i.e. occupies the last 18711040 bytes of the file), the header is 32768 bytes long and then the raw image is 18711040 - 32768 = 18678272 bytes long. We summary these results in the following table:
| Module | Total length of the raw part (Bytes) | length of the header (Bytes) | length of the image (Bytes) |
|---|---|---|---|
| V1 | 6404096 | 32768 | 6371328 |
| V2 | 10270208 | 32768 | 10237440 |
| HQ | 18711040 | 32768 | 18678272 |
The size in byte of a line (the line stride) and how many pixels are stored in this line/the number of lines
According to [1] the sensor resolution of the V1 module is 2592x1944, the resolution of the v2 module is 3280x2464 and the PiCam HQ the resolution is 4056x3040.
According to [4] For the V1 module, the data consists of 1952 rows of 3264 bytes of data. The last 8 rows of data are unused (they only exist because the maximum resolution of 1944 rows is rounded up to the nearest 16). For the V2 module, the data consists of 2480 rows of 4128 bytes of data. There's actually 2464 rows of data, but the sensor's raw size is $2466$ rows, rounded up to the nearest multiple of 16: 2480. Likewise, the last few bytes of each row are unused.
We have to guess the image dimension.
| Module | number pixels of a line | size in byte of a line | used part of the line |
|---|---|---|---|
| V1 | 2592 | 3264 | 2592 ∗ 10/8 = 3240 |
| V2 | 3280 | 4128 | 3280 ∗ 10/8 = 4100 |
| HQ | 4056 | ? | ? |
We have to deduce the size of one line in byte. The pitfall is that the PiCam HQ encodes values on 12bits instead of previous modules that encode values on 10bits. This means that a line of 4056 pixels will consume 4056 * 12 / 8 = 6084 bytes. The length of a line in byte in the file must certainly be a multiple of 16. It then can be 6096, 6112... This value can be deduced by finding the number of the lines in the file and dividing the total size by the number of lines or by simply studying the header.
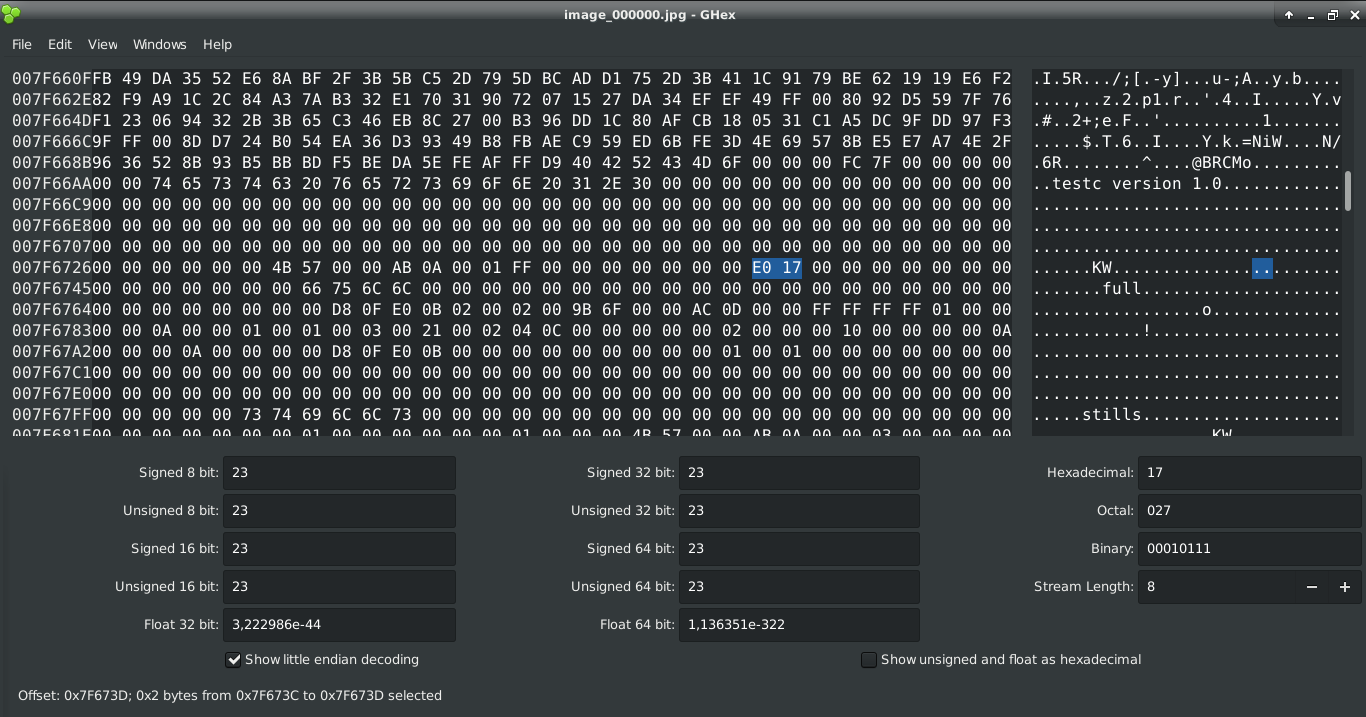
If we look for in a picture taken by the V1 module the value 3264 (0x0CC0) and in a picture taken by the V2 module the value 4128 (0x1020), we find that these values are at a constant offset (160 - 0xA0) from the beginning of the header. If we peek the value at the same offset in a image taken by a PiCam HQ, we find the value 6112 (0x17E0). This validates our though.
Then we can fill in our table:
| Module | number pixels of a line | size in byte of a line | used part of the line |
|---|---|---|---|
| V1 | 2592 | 3264 | 2592 ∗ 10/8 = 3240 |
| V2 | 3280 | 4128 | 3280 ∗ 10/8 = 4100 |
| HQ | 4056 | 6112 | 4056 ∗ 12/8 = 6084 |
The correct variant of Bayer format/The encoding of the pixel values
It is said in [4] that for V1 and V2 modules, Bayer data is organized in a BGGR pattern but later, it is said that data are organized as follow:
# GBGBGBGBGBGBGB # RGRGRGRGRGRGRG # GBGBGBGBGBGBGB # RGRGRGRGRGRGRG
In my point of view, the data startwith a blue pixel followed by a red pixel and next line, the line starts with a green pixel, followed by a red one (and so on) as follow:
# BGBGBGBGBGBGBG # GRGRGRGRGRGRGR # BGBGBGBGBGBGBG # GRGRGRGRGRGRGR
This is what we have observed in previous modules and what we think for this PiCam HQ.
One point important to notice is that previous modules were 10bits modules. According to [4], for the previous modules: the 10-bit values are organized as 4 8-bit values, followed by the low-order 2-bits of the 4 values packed into a fifth byte. As we have 12bits values, we suspect that 2 consecutive 12bits values (two successive pixels) are organized as 2 8-bit values, followed by the low-order 4-bits of the 2 values packed into a third byte. After an examination with ghex, it seems to be correct.
Notice that this part of our report must be validated. We have taken blue pictures, red pictures... to try to validate but we do not have enough time to provide an absolute/rigorous validation. We may be wrong.
From raw format to a beautiful picture
Once we have decoded the raw data, the minimal work you have to do to get a acceptable image is summarized in the following picture:

The green boxes have to be implemented but it is out of the scope of this document.
How to know which picam module has been used?
The problem if you want to generate an image using raw bayer data from a picam is that you have to detect which picam has been used to take the picture.
As we can see in the following pictures, it is simple to detect which picam has been used by just using the header of the file or the header of the raw part. Unfortunately, my new PiCam HQ module has not the value we would have expected in headers...

Conclusion
We provide in this document all missing parameters we need to interpret raw bayer data from Picam HQ. However some parameters need to be validated and it still misses some important points. For example, specification of the IMX219 sensor (the sensor used in the picam V2) has a region dedicated to optical black. It would be great if the Picam HQ has such a region and if we could fetch values from this area.
References
[1] https://www.raspberrypi.org/documentation/hardware/camera/[2] https://www.raspberrypi.org/documentation/configuration/camera.md
[3] https://www.raspberrypi.org/documentation/raspbian/applications/camera.md
[4] https://picamera.readthedocs.io/en/release-1.13/recipes2.html#raw-bayer-data-captures
[5] ghex. https://wiki.gnome.org/Apps/Ghex
[6] picamera python library. https://picamera.readthedocs.io
[7] Dan Aldred, Wesley Archer, Jody Carter, PJ Evans, Richard Hayler, James Singleton, and Rob Zwetsloot.
The offial raspberry pi camera guide . Raspberry Pi Trading Ltd, 2020.
Viewed 3675 times